My Project Portfolio
Scan&Plan, 2024-current


As a researcher at TECNALIA, I actively contributed to the development of Scan & Plan technologies applied to advanced robotic automation. These projects focus on creating robotic applications capable of on-the-fly environment scanning, automatic 3D reconstruction, and robotic path planning and execution without manual intervention.
This approach completely removes the dependency on CAD models—one of the main bottlenecks of traditional robotic automation—and enables rapid adaptation to real-world, variable, and unstructured environments.
The true value of this technology lies in its ability to automate surface treatment processes: highly manual, repetitive tasks often performed in hazardous conditions for operators, as well as high-mix, low-volume production scenarios. My specialization within this field is robotic polishing.
Mental control of exoskeletons, 2020-2024


During my bachelor’s thesis, I was introduced to brain–robot interfaces through a simple project focused on controlling a mobile robot using a NeuroSky EEG headset. After realizing the enormous potential of this technology to support people with disabilities, I decided to orient my entire master’s thesis toward the mental control of a low-cost exoskeleton.
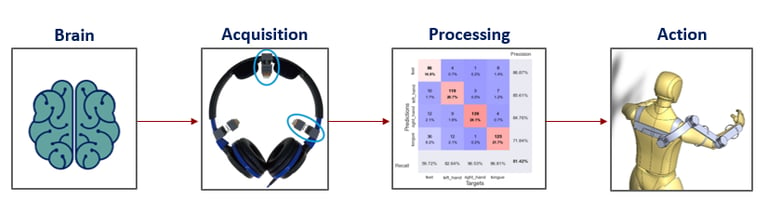
I developed a system that enables robot control using only brain activity. Brain signals were captured through a non-invasive, low-cost EEG headset, provided by Miki Laboratory during my stay at Keio University. Based on motor imagery, the system identifies the user’s intent using artificial intelligence algorithms, transforming these intentions into real robot actions.
The system was first tested on a NAO humanoid robot and later on a simulation of an arm exoskeleton designed from scratch. Communication and command execution with the robot were implemented using ROS, a standard framework in robotics. The results of this research were published in an International Conference.
This project demonstrates that it is possible to control robots with the mind using a small number of sensors and accessible hardware, opening the door to future applications in rehabilitation, medical assistance, and human–robot collaboration.
My @luisinjapan project, 2022-2023
During 2022 and 2023, I created and scaled an Instagram account from the ground up to around 3k followers, surpassing 1M interactions and collaborating with brands through sponsored content.
FSUPV-06, 2018-2019


FSUPV is a multidisciplinary university project made up of students. The team’s goal is to design and manufacture a Formula SAE–style race car, covering all areas of the project: engineering, management, marketing, and logistics.
Within the electronics team, I was responsible for the design, optimization, and manufacturing of the car’s entire electrical wiring harness. By the end of the 2019 season, this work led to the following results:
A 38% reduction in weight and a 56% reduction in power losses compared to the previous season
Testing, validation, and troubleshooting of the vehicle’s electronic systems, working closely with the mechanical and control teams
Contribution to achieving Best Team in Europe and 3rd Best Team in the World during the 2019 season