Mi Portfolio
Scan&Plan, 2024-actual


Como investigador en TECNALIA, contribuí activamente al desarrollo de tecnologías Scan & Plan aplicadas a la automatización robótica avanzada. Estos proyectos se centran en la creación de aplicaciones robóticas capaces de escanear el entorno en tiempo real, realizar reconstrucciones 3D automáticas y planificar y ejecutar trayectorias robóticas sin intervención manual.
Este enfoque elimina por completo la dependencia de modelos CAD —uno de los principales cuellos de botella de la automatización robótica tradicional— y permite una rápida adaptación a entornos reales, variables y no estructurados.
El verdadero valor de esta tecnología reside en su capacidad para automatizar procesos de tratamiento de superficies: tareas altamente manuales y repetitivas, que a menudo se realizan en condiciones peligrosas para los operarios, así como en escenarios de producción de alta variabilidad y bajo volumen. Mi especialización dentro de este ámbito es el pulido robótico.
Mental control of exoskeletons, 2020-2024


Durante mi trabajo de fin de grado, tuve mi primer contacto con las interfaces cerebro-robot a través de un proyecto sencillo centrado en el control de un robot móvil mediante un casco EEG de NeuroSky. Tras descubrir el enorme potencial de esta tecnología para ayudar a personas con discapacidad, decidí orientar todo mi trabajo de fin de máster al control mental de un exoesqueleto de bajo coste.
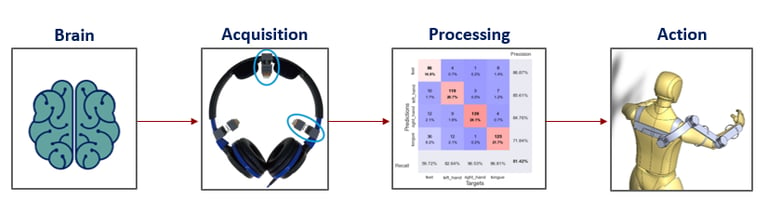
Desarrollé un sistema capaz de controlar un robot utilizando únicamente la actividad cerebral. Las señales cerebrales se capturaban mediante un dispositivo EEG no invasivo y de bajo coste, proporcionado por el Miki Laboratory durante mi estancia en la Keio University. Basándose en técnicas de motor imagery, el sistema identifica la intención del usuario mediante algoritmos de inteligencia artificial y transforma dichas intenciones en acciones reales del robot.
El sistema se probó inicialmente en un robot humanoide NAO y posteriormente en la simulación de un exoesqueleto de brazo diseñado desde cero. La comunicación y ejecución de comandos con el robot se implementaron utilizando ROS, un framework estándar en robótica. Los resultados de esta investigación fueron publicados en una conferencia internacional.
Este proyecto demuestra que es posible controlar robots con la mente utilizando un número reducido de sensores y hardware accesible, abriendo la puerta a futuras aplicaciones en rehabilitación, asistencia médica y colaboración humano-robot.
My @luisinjapan project, 2022-2023
Durante 2022 y 2023 creé y escalé desde cero una cuenta de Instagram hasta alcanzar alrededor de 3.000 seguidores, superando 1 millón de interacciones y colaborando con marcas mediante contenido patrocinado.
FSUPV-06, 2018-2019


FSUPV es un proyecto universitario multidisciplinar formado por estudiantes. El objetivo del equipo es diseñar y fabricar un monoplaza de competición tipo Formula SAE, abarcando todas las áreas del proyecto: ingeniería, gestión, marketing y logística.
Dentro del equipo de electrónica, fui responsable del diseño, optimización y fabricación de todo el cableado eléctrico del vehículo. Al final de la temporada 2019, este trabajo dio lugar a los siguientes resultados:
Reducción del peso del 38 % y reducción de las pérdidas de potencia del 56 % con respecto a la temporada anterior.
Ensayos, validación y resolución de incidencias de los sistemas electrónicos del vehículo, trabajando en estrecha colaboración con los equipos de mecánica y control.
Contribución al logro de Mejor Equipo de Europa y 3.º Mejor Equipo del Mundo durante la temporada 2019.